
Recolección selectiva de espárragos con un robot autónomo
AvL Motion está abriendo nuevos caminos - con una máquina para la cosecha selectiva de espárragos blancos, "adornada" con sensores de alta precisión así como RFID y tecnología de bus de campo de Turck
La empresa holandesa AvL Motion puso en el mercado una máquina para la cosecha selectiva totalmente autónoma de espárragos blancos. En su búsqueda de un sensor ultrasónico para el control de la altura, la compañía encontró el RU40U compatible con IO-Link de Turck. A través de la colaboración posterior se integró más tecnología de sensores en el vehículo, incluyendo interruptores de proximidad inductivos en miniatura, codificadores precisos así como sensores láser LE550 de Banner Engineering y el robusto sensor de posición lineal Li500-Q25. AvL también utiliza el cabezal de lectura/escritura RFID TN-Q14 para la identificación de los módulos de recolección, mientras que el módulo compacto de E/S TBEN-S2-4IOL transfiere las señales IO-Link al PLC.
-turck-image.jpg)
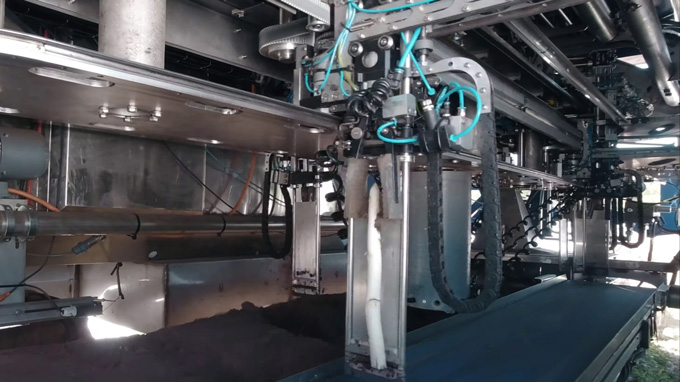
El AvL Compact S1560 saca automáticamente los espárragos del suelo.

En la máquina se encuentran de seis a doce módulos de cosecha

El fundador de AvL, Arno van Lankveld, usa el sensor ultrasónico IO-Link RU40U de Turck

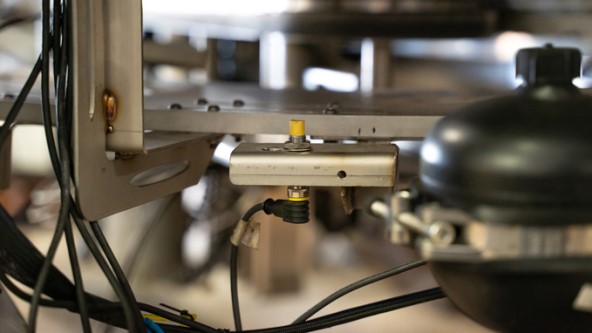
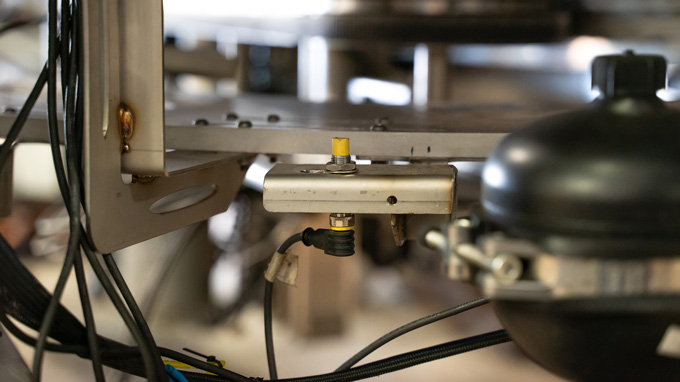
El diseño robusto del sensor Li500-Q25 permite ser instalado en el exterior sobre el eje delantero

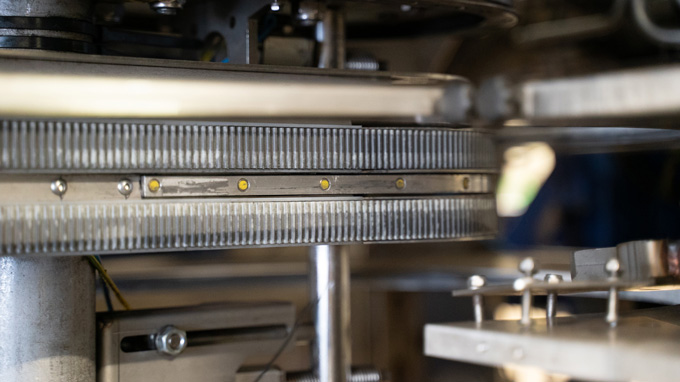
Los sensores miniatura BI3-M08K en el área del buffer detectan el número de cassettes de cosecha
Cuando un casete pasa por el NI10U-M12, el PLC inicia el temporizador para una operación de cosecha

Los codificadores informan la posición de la memoria se encuentra actualmente un módulo de recolección

En la conducción, un trabajador empaqueta los espárragos en cajas y tiene el control de la cosechadora

El dispositivo multiprotocolo TBEN-S2-4IOL se utiliza como interfaz entre los sensores y el PLC
-turck-thumbnail.jpg)








.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Control de altura por medio de un sensor ultrasónico con IO-Link
AvL Motion utiliza dos de los sensores ultrasónicos RU40U con IO-Link para medir la distancia entre el lecho de espárragos y el marco interno controlado neumáticamente de la máquina. A pesar del subsuelo parcialmente polvoriento o mojado por la lluvia, los sensores permiten una medición estable de la altura, que los usuarios pueden ajustar en un HMI. "Turck nos impresionó con la excelente calidad y la rápida entrega de su producto. Por lo tanto, nos quedamos con el fabricante para otros componentes", dice el CEO de AvL Arno van Lankveld.
El proceso óptico reemplaza al ojo entrenado
El proceso de cosecha del AvL Compact S1560 es muy dinámico. Una vez que la máquina se posiciona y se pone en marcha, la superficie del suelo es escaneada. La ubicación precisa de una punta de espárrago es detectada por el controlador principal mediante el uso de sensores láser, junto con un proceso óptico adicional. Un número variable de módulos de cosecha se mueven en el proceso alrededor de una pista circular dentro del robot. En la actualidad, esta consiste en doce de los casetes de unos 25 centímetros de altura. Se ajustan a la velocidad del robot y controlan todo el proceso de inserción, corte y agarre.
Ajuste fino entre el objetivo y el módulo de cosecha
El controlador no sólo necesita las coordenadas de los espárragos seleccionados para afinar el proceso de cosecha, sino también un flujo continuo de información sobre la posición y el movimiento de los módulos. Esto comienza con la consulta de cuántos cassettes están situados actualmente en la memoria intermedia, es decir, cuántos están en posición de parque, y los que actualmente detectan un brote de espárragos en el circuito. Para ello, la empresa utiliza los diminutos sensores inductivos BI3-M08K. La identificación exacta de los módulos de cosecha se implementa con RFID - usando el cabezal de lectura/escritura TN-Q14 HF, que lee el código individual de cada casete. A esto se añade la detección de posición proporcionada por un codificador rotativo.
El sensor inductivo activa un temporizador
Una vez que una máquina cosechadora inicia su circuito, pasa por un interruptor de proximidad uprox tipo NI10U-M12, que establece el funcionamiento del temporizador para el proceso de cosecha en el PLC. Como los espárragos no crecen en hileras ordenadas, los módulos de cosecha también pueden moverse a la izquierda o a la derecha además de su movimiento alrededor de la pista circular. Esto se realiza con aire comprimido y por lo tanto siempre se retrasa unas décimas de segundo. Para garantizar, no obstante, la correcta alineación de los casetes, el PLC obtiene información sobre la distancia entre la posición inicial y la posición de destino de los módulos, medida con sensores láser LE550 del socio de Turck en optoelectrónica, Banner Engineering.
Maniobra de giro con joystick
Los operadores utilizan un módulo de control externo para controlar la velocidad y la dirección hidrostática de la máquina cosechadora. Dos codificadores Turck miden las revoluciones de la rueda; AvL utiliza un sensor de posición lineal inductivo para medir la posición de la rueda. Para ello, el elemento de posicionamiento del sensor LI500-Q25 está unido al pistón del cilindro de dirección. De esta manera, el controlador principal calcula el ángulo de ambas ruedas utilizando un solo valor, y los operadores pueden girar la máquina fácilmente con un joystick. A diferencia de los modelos que ofrece la competencia, los agricultores no tienen que acoplar el AvL Compact S1560 a un tractor.
- Automotriz
- El cable con control de corriente integrado evita paradas no deseadas del sistema de transporte
- Los acopladores inductivos garantizan una alimentación precisa del material
- Administración de ensamblaje con una conexión directa a MES
- Detección de carrocerías en la producción de automóviles.
- Detección confiable de derrape durante la producción de automóviles
- Recolección de pedidos JIS sin errores para los topes
- El modo de bus RFID garantiza la calidad de las baterías de iones de litio
- Medición de nivel en la línea de recubrimiento por inmersión
- El control de nivel en el sistema de lubricación centralizada
- El sensor de ángulo de inclinación acelera la alineación de la plataforma
- Control del motor con monitoreo de la condición
- El módulo híbrido IP67 procesa señales de seguridad
- Vigilancia descentralizada de estaciones refrigerantes
- Celdas de soldadura robotizadas en red con Ethernet
- Monitoreo del circuito de enfriamiento en abrazaderas de soldadura
- Monitoreo de flujo en lavadoras de tambos
- Innovación en el monitoreo de condiciones en los motores
- Monitoreo de nivel a través de la nube
- Taller de prensado - Identificación de herramientas
- Carrocería
- Pintura
- Ensamble Final
- Transmisiones y motores (powertrain)
- Detección a nivel de artículo con UHF RFID
- Suministro de refrigerante en máquinas
- Controla la presión hidráulica en las industrias de prensado.
- Medición de la presión del proceso en las plataformas
- HISTORIAS DE ÉXITO
- Planta modular para una producción flexible y eficiente
- Sensor láser detecta los parachoques en la celda de ensamble
- Tecnología de seguridad descentralizada para una producción modular
- Sistema modular de bandas transportadoras
- Módulos E/S y RFID para cambios de herramienta de manera segura
- RFID en vehículos guiados automáticamente (AGV)
- Producción de silenciador de escape con Hubs IO-Link
- Identificación de pallets en la producción de ventilas traseras
- Detección de tuerca en el proceso de soldadura
- Rastreabilidad RFID
- RFID en la producción de motores
- Producción de defensas con identificación RFID
- Soluciones para el área de pintura
- Sensores para ensamblaje y soldadura
- Sensores de ángulo para sistemas de ensamble
- Identificación de Herramientas
- Productos únicos para bandas transportadoras
- RFID para área de carrocerías
- IO-Link facilita la producción de engranes diferenciales
- Química
- El sistema de E/S excom permite la licuefacción segura de hidrógeno
- Automatización descentralizada en zonas Ex
- Control RFID de las conexiones de los tubos en la zona Ex
- Conexión de señal Ethernet en la sala de I&C
- Automatización basada en Ethernet de los 'skids' modulares
- Aislamiento de áreas peligrosas en las industrias de procesos
- Detección de Pigs
- Señal de E/S Remota
- Conexión fácil de dispositivos de campo
- Procesamiento de señales con E/S del sistema en el gabinete de control
- Separación de señal con tecnología de interfaz en el gabinete de control
- Identificación de conexiones de manguera
- Monitoreo eficiente de gabinetes en el campo
- Monitoreo de los actuadores de cuarto de vuelta
- Planificación y montaje de soluciones de sistema
- Historias de Éxito
- Refrigeración eficiente de hornos industriales con los sensores de flujo FS+ de Turck
- Sistema Excom de E/S genera espacio en las salas I & C
- Zona 2 y RFID 22
- Control de prueba eficiente
- Seguridad Intrínseca: Comunicación en campo
- Alianza en sistema de Control de Procesos
- E/S remotas para áreas peligrosas
- Comentarios de la válvula de doble posición
- Felxibilidad con buses de campo
- Manejo de activos con Entradas y Salidas remotas
- Posicionamiento correcto con RFID en Producción de Carbid
- Conversión rápida en un espacio limitado
- Energía
- Identificación por RFID en las bandas transportadoras de celdas solares
- Solución de E/S descentralizada en zona Ex para estación de servicio de H2
- El módulo de E/S facilita la configuración y el uso móvil del banco de pruebas de pilas de combustible
- Turbina con posicionamiento de rotación
- E/S IP67 en la producción de carbón
- RFID UHF Identifica Gabinetes Eléctricos
- E/S Remotas en Planta de Biogás
- Alimentos y Bebidas
- El sensor de monitoreo de condiciones automatiza el control del clima
- Monitoreo de las condiciones de los gabinetes de control
- Monitoreo de condiciones en almacenes
- Control del espesor de la masa en las máquinas de rodamiento
- Identificación de los contenedores de comida
- Reemplazo rápido del sensor en plantas de bebidas
- Detección de tuberías en codo
- Identificación de moldes de chocolates
- Historias de Éxito
- Mantenimiento basado en la nube para generadores de vapor
- El soporte RFID permite el seguimiento y la localización en la producción de alimentos
- Detección confiable de posición lineal en la zona Ex 22
- Módulos de control descentralizados en los cuartos fríos
- Seguimiento en la producción de carne con RFID
- Encoder sin contacto en la producción de papa
- UHF RFID en el centro de distribución de alimentos
- RFID para la producción del chocolate
- E/S distribuidas para equipos de alimentos
- E/S remotas para destilerías
- RFID y Autoclaves
- Transparencia en la fabricación del chocolate
- Fuentes de alimentación IP67 para Conveyors
- Identificación en el almacenamiento de productos alimenticios
- Logística
- Control descentralizado de módulos en la banda transportadora
- Rastreo de sacos grandes con RFID
- Detección de distancia en grúas de contenedores
- Control de acceso a zonas protegidas
- Sistema de silenciamiento descentralizado de equipos de protección electrosensible
- Bloques de E/S Módulos de transporte de rodillos de control
- Detección rápida de etiquetas en las compuertas en almacenes
- Detección a nivel de artículo con RFID UHF
- Mantenimiento Preventivo en Bandas Transportadoras
- Detección de contenedores de transporte
- Detección de nivel en recipientes
- Identificación en recipientes criogénicos
- Identificación de contenedores móviles con dispositivos handheld
- Identificación de los envases de alimentos
- Tier 1 - Identificación de choques
- Monitoreo de la condición en las salas de almacenamiento
- Protección contra colisiones en gruas 'reach stacker'
- Success Stories
- RFID con modo bus HF facilita el almacenamiento de semillas
- La tecnología RFID permite un almacén sin personal en una gran obra de construcción
- Los módulos de E/S y seguridad aumentan el rendimiento en la intralogística
- Rastreo de envíos de materias primas
- Solución de rastreo basada en RFID para minimizar los errores de carga
- Seguimiento de materiales entrantes y salientes mediante RFID
- Solución descentralizada RFID UHF
- Contact-free Encoder in Potato Production
- Módulos de control descentralizado en la cámara frìa
- Control de velocidad mediante el sensor de radar QT50
- Fuentes de alimentación IP67 para los transportadores
- Sistema de transporte modular
- Solución RFID para el almacén
- La RFID guía a los AGV en la producción en suspensión
- RFID identifica los productos farmacéuticos
- RFID UHF en el centro de distribución de alimentos
- Equipo Móvil
- El sensor de control de estado automatiza la climatización
- Compensación automática en pendiente
- Líneas de distribución para pulverizadores de campo.
- Medición del ángulo en un pulverizador de campo
- Determinar el ángulo de posición de la plataforma de elevación
- Medición de inclinación de dos ejes en una cosechadora
- Protección contra colisiones en apiladores de alcance
- Historias de éxito
- Solución RFID con montacargas inteligentes en la producción automotriz
- Mantenimiento seguro a distancia de bombas de riego y drenaje
- Acceso controlado con sistema RFID
- Cosechador de espárragos selectivo
- Medición de posición con RFID y encoder
- Control de velocidad por medio de Sensor Radar QT50
- RFID Guía a AGV en la producción de suspensiones
- Modulos de E/S (TBEN) en yate de lujo
- Encoder sin desgaste en draga de tolva
- I/O para supresión de polvos
- Gabinete de enfriamiento
- Conectividad de desconexión rápida
- Soluciones de Automatización para frío extremo
- I/O remoto para grúas
- Elevador resistente de metales pesados
- Posicionamiento de montañas rusas
- Soluciones de maquinaria móvil
- Posición exacta de altura
- Detección de ángulo crítico
- Sensor de ángulo que detecta cuando se levanta la plataforma
- Petróleo y Gas
- Control Cabinet Guard protege los sistemas de TI de los ataques de los hackers
- Transductor de temperatura en carril DIN
- Sensores utilizados en plataformas marítimas con certificación ATEX
- Cableado de desconexión rápida para áreas peligrosas
- Los gabinetes de control compactos garantizan una alta seguridad de la información
- Embalaje
- Verificación descentralizada de paquetes de RFID
- Identificación de cartuchos de impresión a color
- Operación confiable de maquinaria
- Monitoreo de limites en líneas de llenado
- Supervisión de los procesos de cambio
- Identificación de botellas de prueba
- Monitoreo de nivel de café molido
- Detección de nivel en embarcaciones
- Detección de contenedores de transporte.
- HISTORIAS DE ÉXITO
- Farmacéutica y Biotecnología
- Seguimiento de muestras de principio a fin con RFID
- Control RFID de las conexiones de tubos en la zona Ex
- Verificación descentralizada de paquetes de productos farmacéuticos
- Automate Modular Skids
- 'Skids' farmacéuticos con tecnología de E/S descentralizada
- Aislamiento en plantas de proceso modulares
- Control de interfaces de válvulas
- Monitoreo de actuadores de cuarto de vuelta
- Detección de tubos en codo
- Señal remota de E/S
- Planeación y construcción de una estación de proceso
- Facil conexión de dispositivos de campo
- Identificación de recipientes criogénicos
- Identificación de contenedores móviles
- Identificación de contenedores móviles con dispositivos portátiles
- Identificación de conexiones de manguera para precursores
- Identificación de conexiones de tubo en áreas estériles
- Identificación de las conexiones de manguera en la zona Ex 1
- Identificación de bolsas grandes y biorreactores
- Identificación de aplicaciones de uso único
- HISTORIAS DE ÉXITO
- Transferencia sin contacto de energía y señales de conmutación
- Controles HMI en mezcladora industrial
- Máquina de procesamiento de imágenes controlada por el Gateway BL20
- RFID para identificar fármacos
- Medición de velocidad de cabezales mezcladores en agitadores magnéticos
- El dispositivo de lectura detecta diferentes materiales
- Semiconductor
Select Country
Turck worldwide